2.4 运动学模型的建立
在完成三维模型的建立后,首先对其添加约束副。LMS Virtual Lab Motion的约束库中提供了各种常见的约束,像回转副、圆柱副、棱柱副、齿轮副等等,运动支架六个关节都是旋转关节,用六个回转副来描述其约束关系。 施加驱动 六个关节的驱动都采用Joint driver ,驱动函数选择SPLINE.CURVE 类型,所需数据存在Excel文件中。根据运动支架所要完成的任务,进行轨迹规划,取得样条曲线所需的数据。
2.5 动力学模型的建立
定义惯性参数惯性参数包括质量、转动惯量、质心位置等。惯性参数的准确程度,会直接影响计算结果的准确度。质量我们容易测量,但是转动惯量和质心就不方便测量,可以由机械设计人员通过CAD软件取得。惯性参数不可能一次确定,随着设计的进行,惯性参数会不断变化并逐步确定。
动力学模型是逐渐完善的过程,本文不考虑运动支架的柔性问题,只建立运动支架的多刚体模型。
2.6 仿真参数的设定
将重力加速度Z(X Y)Gravity设为 0 ,因为系统处于微重力环境下。微重力环境很难在地面实现,但是在软件里可以很容易实现。初始速度分配方法选择最小动能方法(Minimum Kinetic Energy method)。这种计算初始速度的方法使系统在初始时动能最小。运动支架这个多体系统处于自由漂浮状态,支架运动过程中会对基座(目标飞行器)的位姿产生影响,速度的分配或者说运动学与动力学耦合正是在于系统动能最小,动量守恒。 仿真步长、计算误差等采用默认设置。
3 仿真结果
舱外摄像运动支架拍摄对接过程时,只有第二,三,四关节动作,其关节角随时间变化的规律如下图4 :
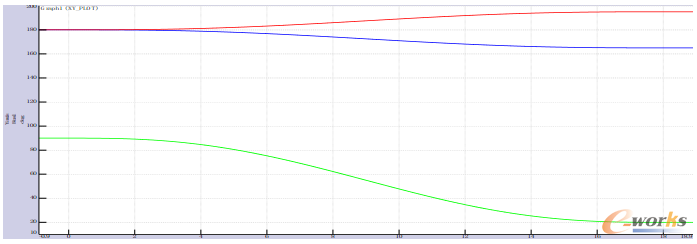
图4 关节角随时间变化曲线
这里给出的是运动时间为 18s 的数据,实际的为300s ,因此所用这里各关节的角加速度为实际的20倍。这么作是因为实际的角速度太小,计算出的关节力矩受计算误差影响会很大。这三个关节动作过程中,实际规划的角加速度(度/ 平方秒)分别为:0.0107 ,0.0107 ,0.0133 ,是相当小的。运动过程中,第二,三,四关节的力矩变化如下图 5 所示:
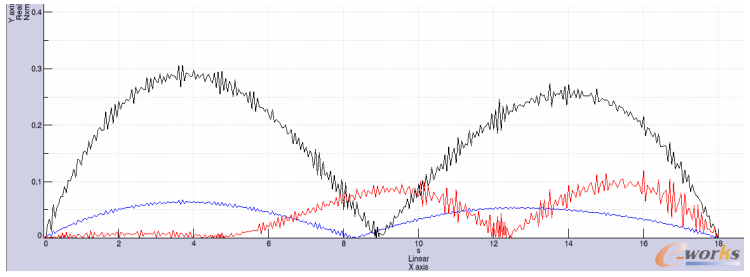
图5 关节力矩随时间变化曲线
从计算我们可以看到,第三个关节的力矩最大值为 0.3Nm ,其余两个都在 0.1Nm 下,相当于我们伸直手臂,一只蝴蝶在站在指尖对肩部产生的力矩。实际动作过程中最大力矩值更小,为计算值的二十分之一。
支架运动过程中,对目标飞行器的姿态和位置都会有一定影响,通过计算,看到对姿态三个方向角的影响在0.012 度以下。这个数值跟目标飞行器的质量特性关系很大,因为目标飞行器的质量和体积与运动支架相比要大得多,而支架末端得负载在十公斤左右,所以,支架对目标飞行器位姿得影响不是很大。
4 结论
本文建立了空间自由漂浮基座多体系统的多刚体模型,并用该模型分析了舱外摄像运动支架运动过程中关节力矩和对目标飞行器位姿的影响。这对空间机械臂的设计有很重要的意义。仿真模型分析的数据对于机构减速比的选择,电机的选型,以及末端可携带负载的大小都是很重要的参考,并且为下一步柔性因素对多体系统的影响提供基础。









