在有限元模型中,由于是非线性分析,所以在分析步中只能使用通用分析步(General)。此处选用隐式动力学(dynamic,Implicit)。增量步的值由ABAQUS自动控制,且设置允许最小增量步为0.001。在金属垫片处施加Y向1.12g的加速度扫频信号,信号的频率范围为5~400Hz,信号时长为4s,分辨率为1000Hz。边界条件的设置将限位垫片的X、Z向的自由度约束住。
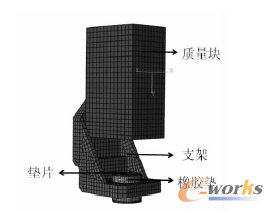
图3 单自由度橡胶减振器系统有限元模型
1.4 有限元分析结果
设定参数后,对单自由度橡胶减振器模型进行分析计算。仿真结果的前2s的时域信号如图4。
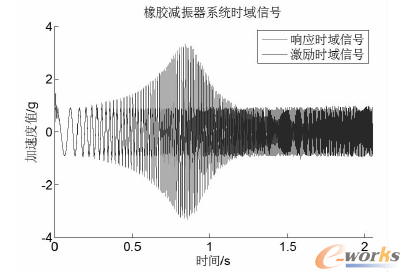
图4 橡胶减振器系统仿真时域数据
对时域信号在Matlab中以激励信号为输入信号、以响应信号为输出信号利用Tfestimate函数进行传递函数估计可得其频域关系,如图5。由图中可以看到减振器系统先会经历一段放大区即图中红线上部的区域,在这段区域内激励信号传递到质量块上端时会放大,然后系统在进入减振区即红线下部区域,该区域随着激励频率的增加,传递到质量块上的信号会衰减。同时由图中可以看到该橡胶减振系统的共振点为A点,系统固有频率为87.89Hz。图中传递函数幅值为1的直线(红色直线)与减振器曲线的交点为减振起始点即B点。
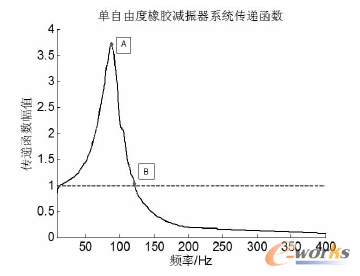
图5 橡胶减振系统传递函数
2 橡股减振器振动试验验证
对单自由度橡胶减振器系统开展振动试验,分别在台面夹具上和质量块上安装加速度传感器,通过测量传感器的数据以夹具上的信号为输入信号、以质量块上的信号为输出信号。通过输入输出信号的传递函数考察共振频率和减振性能。通过振动试验来验证非线性有限元分析的准确性。
在正弦扫频试验中,振动台使用的是苏州试验仪器厂的DY-1000-8电动振动试验系统,控制系统使用的是STI-RC2000,数据采集系统使用的北京东方振动和噪声技术研究所的DASP数据采集系统。
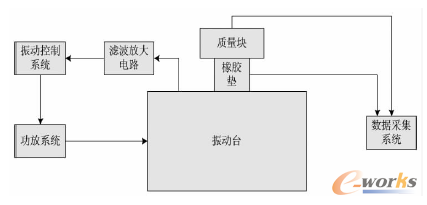
图6 振动试验系统示意图
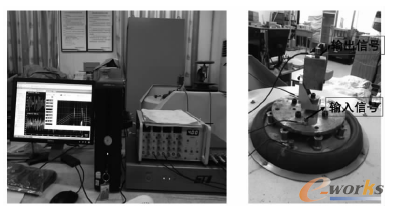
图7 振动试验系统实物图
在试验中对系统施加1.12g的线性扫频加速度激励信号,频率范围为5~400Hz。测试结果如图8。
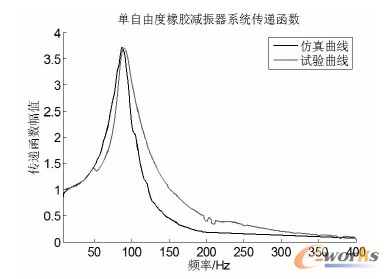
图8 单自由度橡胶减振器系统传递函数
通过试验曲线可得该单自由度橡胶减振器系统的共振频率为89Hz,试验值与仿真值的相对误差为1.25%。仿真曲线与试验曲线在峰值处吻合的比较好,在共振点之后的衰减梯度上有一定误差,从仿真过程来看可能是橡胶与支架接触的接触属性设置上存在误差。
3 结论
本文基于ABAQUS有限元软件,考虑材料非线性、几何非线性、边界条件非线性等因素,建立了橡胶减振器的精确的非线性有限元模型,通过非线性分析得到了该系统的共振频率为87.89Hz。并通过振动试验验证有限元模型,发现有限元计算与试验结果误差在1.15%左右。该结果说明有限元建模方法可以很好的模拟橡胶减振器的动态特性,同时说明了所建立模型的准确性和建模方法的有效性,可以为后续的橡胶减振器的选型、优化设计以及使用减振器的设备的动态分析等提供分析基础。









